Welcome to the GEOMAR AI Seminar Series
Everardo González (egonzalez@geomar.de)
Naveen Parameswaran (nparameswaran@geomar.de)
\[N=R_{*}\cdot f_{\mathrm{p}}\cdot n_{\mathrm{e}}\cdot f_{\mathrm{l}}\cdot f_{\mathrm{i}}\cdot f_{\mathrm{c}}\cdot L\]
"But where is everybody?"
— Enrico Fermi, 1950
One big question:

"Where to Sample Next?"
"Information Gain"
(Kullback–Leibler Divergence)
$D_{KL}(P\|Q) =$
$-\sum\limits_{x\in X}$
$p(x)$
$\log($
$q(x)$
$) + \sum\limits_{x\in X}$
$p(x)$
$\log($
$p(x)$
$)$
"Information Gain"
(Kullback–Leibler Divergence)
$D_{KL}(P\|Q) =$
$-\sum\limits_{x\in X}$
$p(x)$
$\log($
$q(x)$
$) + \sum\limits_{x\in X}$
$p(x)$
$\log($
$p(x)$
$)$
Observation Probability
Prediction Probability
Features
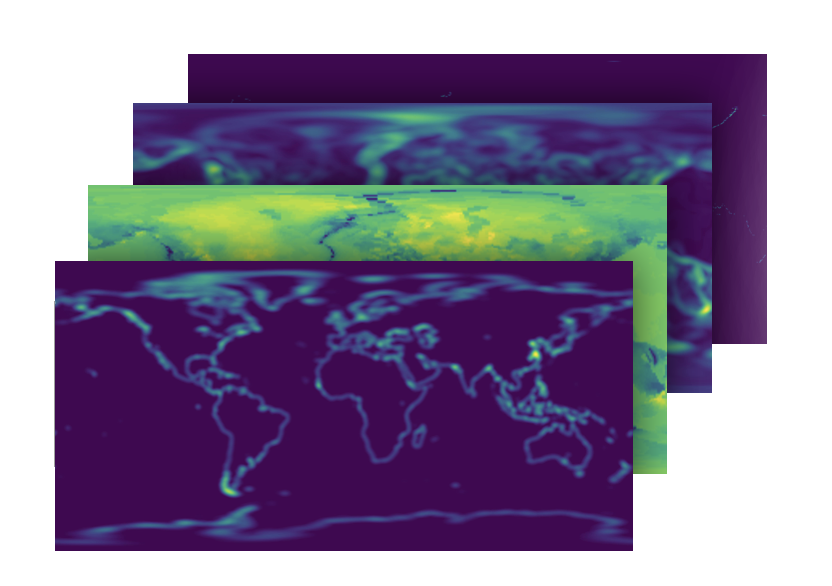
~400 Global Maps
Labels
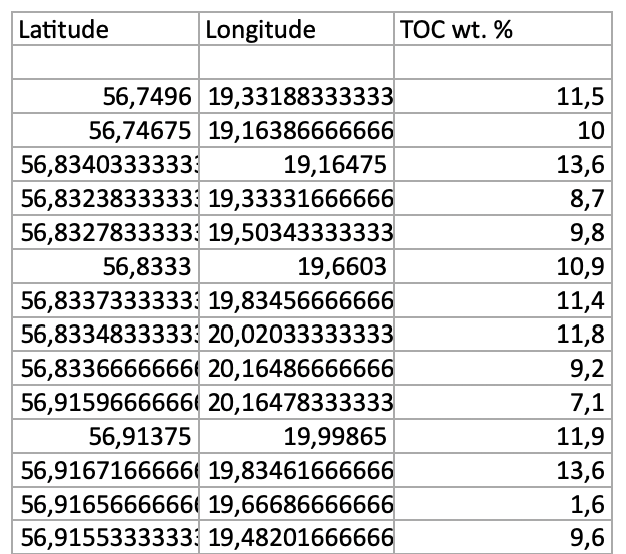
~5000 Total Organic Carbon Measurements
Neural Network with DropOut
Monte Carlo Drop Out
One day...
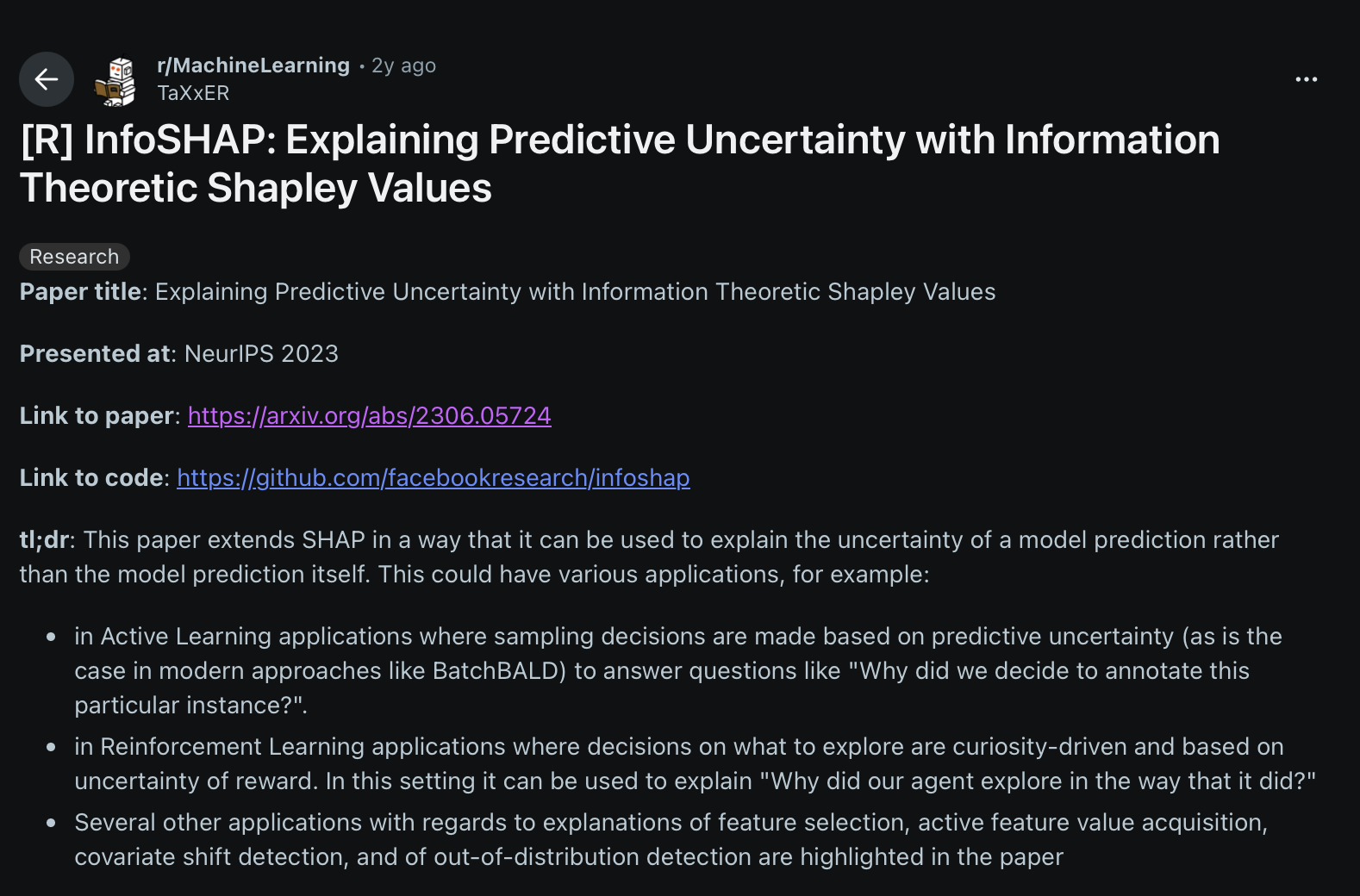
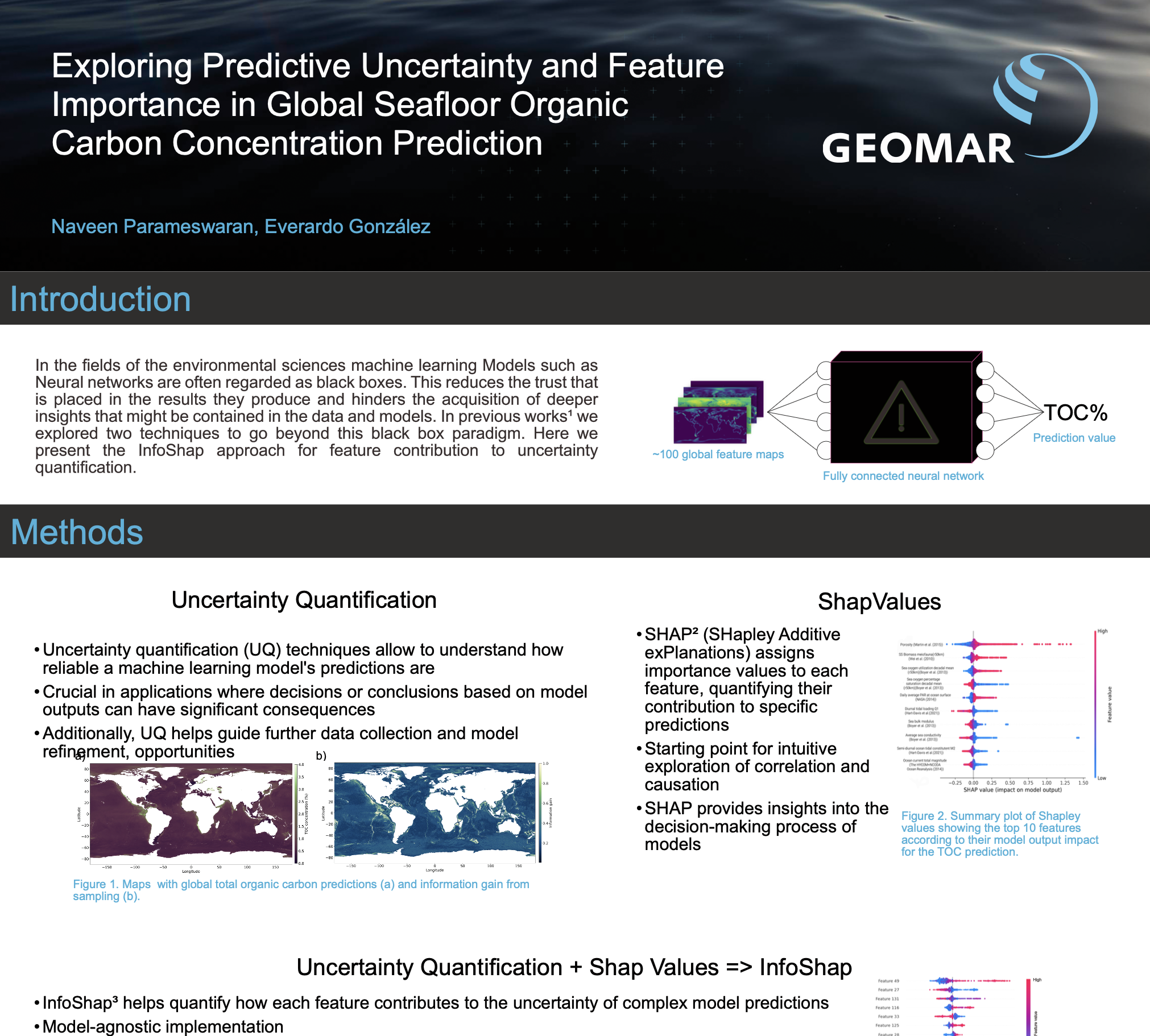
Previous Works: Uncertainty Quantification, SHAP, ...
InfoSHAP: Uncertainty Quantification x SHAP
🤔
The Data
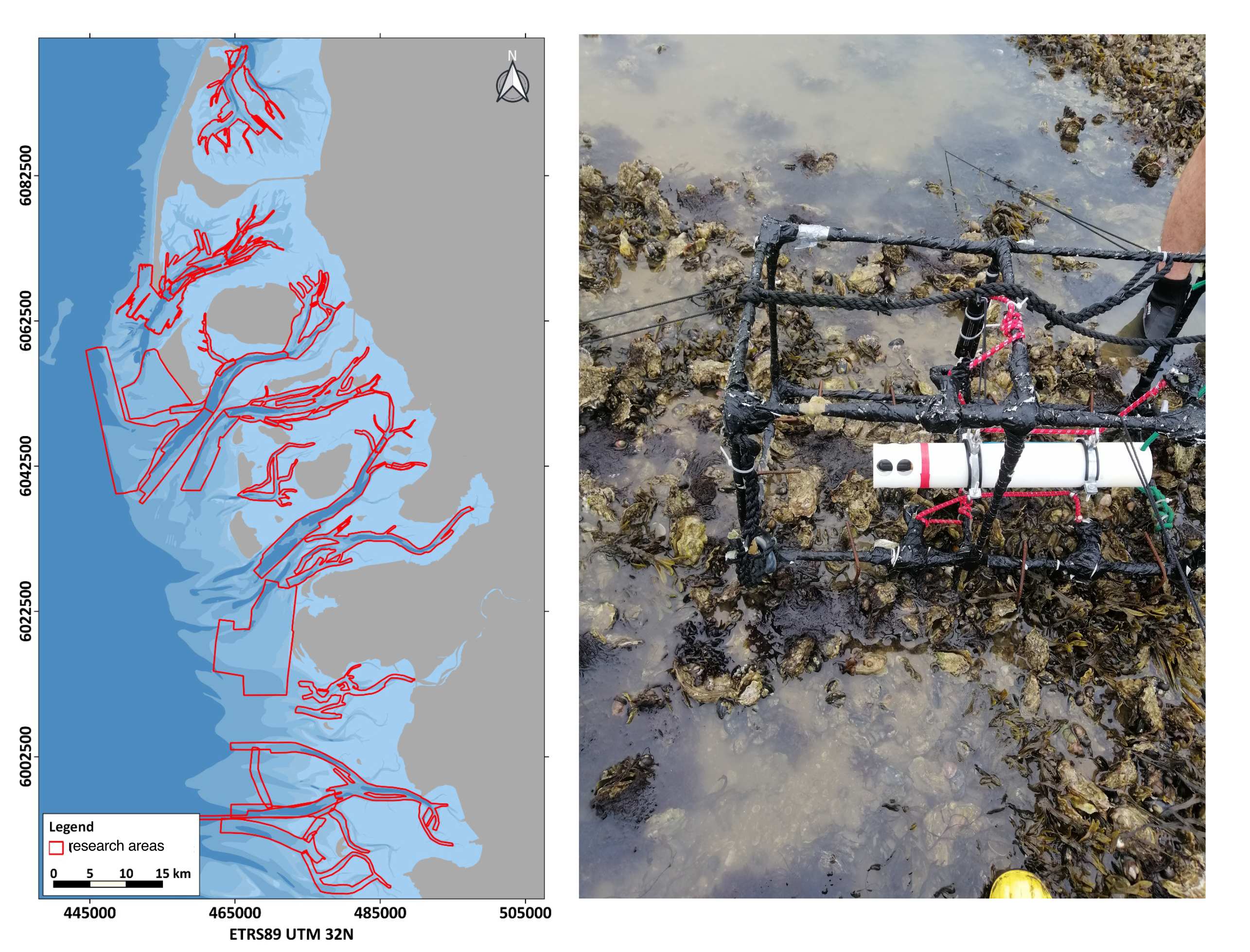
~50h recordings in German North Sea coastal waters
The Data

5 sec. snippets ⇒ ~40,000 labeled (!!!) datapoints
~20 unique feature combinations ⇒ classes

Solution: Word Embeddings!
Can we do that for underwater soundscapes?
The Model

contrastive learning with MobileNet 2
Audio Sample Info
Legend
AI x Ocean Science:
GEOMAR AI Seminar Series
- Meet other people working on ML
- Open discussion, transdisciplinary ideas exchange
- Get inspired, do great science
Fin
Questions? Comments?
egonzalez@geomar.de